
Larger allowable moment of inertia, stronger performance, suitable for multi-piece handling by large end actuators
Battery-free motor unit
No need to replace batteries
Reduced downtime
J2 the top of the joint add Ethernet connection port, built-in Cat 5e camera cable, easy to move camera installation
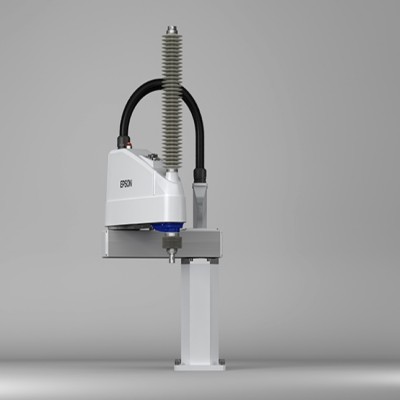
The second arm is inclined out of line, more compact in shape and less space for installation
General I/O interface, more applicable controller
Like RC700-A controllers, RC90-B controllers support NPN /PNP two wiring modes.
M/C cable with simple detachable structure
• Disassembly without using tools for easy unloading
• Easy to install and replace robots inside equipment
Product name | LS20-B | ||
Product model | LS20-B804* | LS20-BA04* | |
Installation method | Table installation | ||
Arm length | 1-2 axis arm | 800 mm | 1000 mm |
Maximum movement speed | J1-2 | 9940 mm/s | 11250 mm/s |
J3 | 2300 mm/s | ||
J4 | 1400°/s | ||
Body weight (excluding cable) | 48 kg | 51 kg | |
Repeat positioning accuracy | J1-2 | ±0.025 mm | |
J3 | ±0.01 mm | ||
J4 | ±0.01° | ||
Maximum range of motion | J1 | ±132° | |
J2 | ±152° | ||
J3 | 420 mm | ||
J4 | ±360° | ||
Load * 1 | Rating | 10 kg | |
Maximum | 20 kg | ||
Standard cycle time * 2 | 39 sec | 0.43sec | |
Allowable moment of inertia of the fourth joint * 3 | Rating | 0.05 kg·㎡ | |
Maximum | 1.00 kg·㎡ | ||
Motor power consumption | J1 | 750 W | |
J2 | 520 W | ||
J3 | 520 W | ||
J4 | 150 W | ||
Apical pressure of the third joint | 250 N | ||
Origin Return | No need to reset the origin | ||
User circuit | 15 pin (D-sub interface), RJ45 8 pin (cat 5e) | ||
User gas path | ø6mm×2, ø8mm×2 Withstand voltage:0.59 MPa(6 kgf/cm2 )(86 psi) | ||
Installation environment | Standard / clean * 4 | ||
Applicable controller
| RC90-B | ||
safety standards | CE,KC,ANSI/RIA R15.06-2012,NFPA 79 (2007 Edication) | ||
